
Description
What is a Flexible GPS PCB Antenna Passive GNSS Antenna?
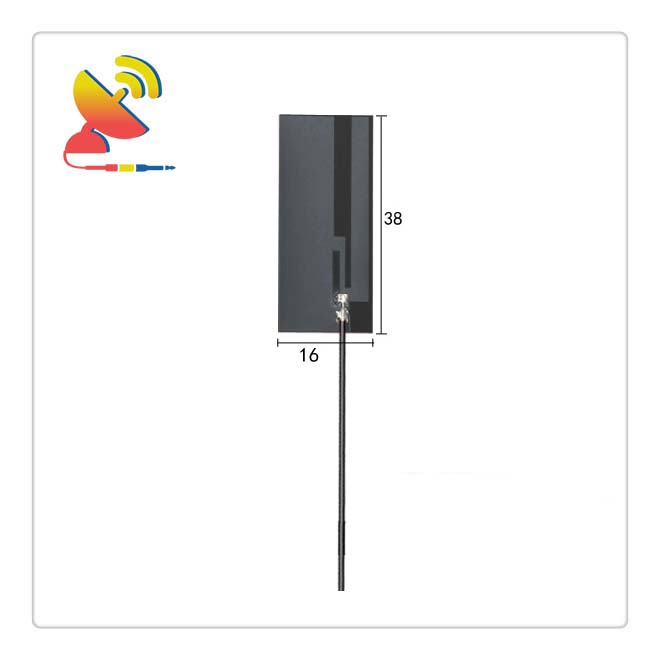
The Flexible GPS PCB Antenna CTRF-ANTENNA-GPS-1575-3816-UFL is a Passive GNSS Antenna that comes with a 38x16mm compact size operating the GPS 1575.42Mhz center frequency for modules, chips, etc. flexible GPS PCB antenna manufactured by C&T RF Antennas Inc.
The Internal antenna Flexible GPS PCB Antenna With U.FL Connector, RG 1.13 Cable 100MM, 2dBi gain, find complete details about the GPS PCB Antenna Factory Price, Please Contact To C&T RF Antennas Inc Sales Team.
C&T RF Antennas Inc provides internal & external antennas with the antenna radio frequencies such as NFC, 169MHz, 230MHz, 315MHz, 433MHz, 868MHz, 915MHz, VHF&UHF, Lora, NB-IoT, ADS-B, GSM, GNSS, Wifi 2.4GHz, 5.8GHz, Cellular 2G 3G 4G LTE, GPS, 5G NR, etc.
C&T RF Antennas Inc. provides RF antennae with Omni & Directional antenna types such as Dipole Antennas, Whip Antennas, Marine Antennas, Router Antennas, MIMO Antennas, Combo Antennas, PCB Antennas, FPC Antennas, Spring Antennas, Magnetic Antennas, Sector Antennas, Yagi Antennas, and Accessories, etc, for IoT & M2M industries.
Flexible GPS PCB Antenna Passive GNSS Antenna Is Available At C&T RF Antennas Inc. We offer flexible GPS PCB antenna Inventory, flexible GPS PCB antenna pricing, and a datasheet For flexible GPS PCB antennas.
Contact us for more internal-external active & passive GPS antenna details.
Flexible GPS PCB Antenna Passive GNSS Antenna Specifications
Flexible GPS PCB Antenna Passive GNSS Antenna Electronical Specifications |
|
| RF Antenna Type | Passive GPS Antenna |
| Model | CTRF-ANTENNA-GPS-1575-3816-UFL |
| Frequency | 1575.42 MHz |
| Gain | 3dBi |
| VSWR | ≤2.0 |
| Impedance | 50 Ω |
| Polarization | Right Hand Circular Polarization |
| Cable | RG1.13mm |
| Cable Length | 130mm |
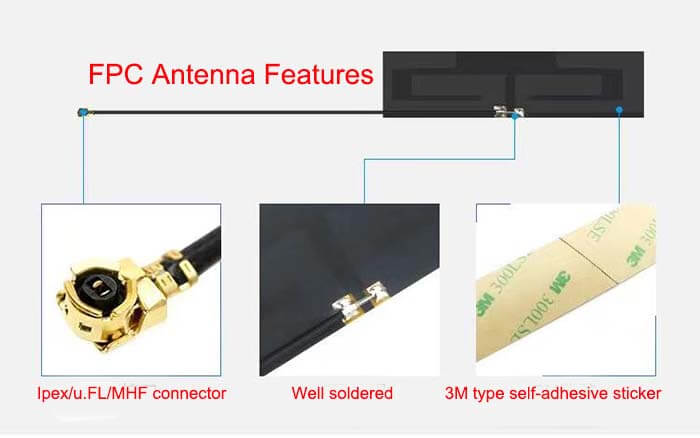
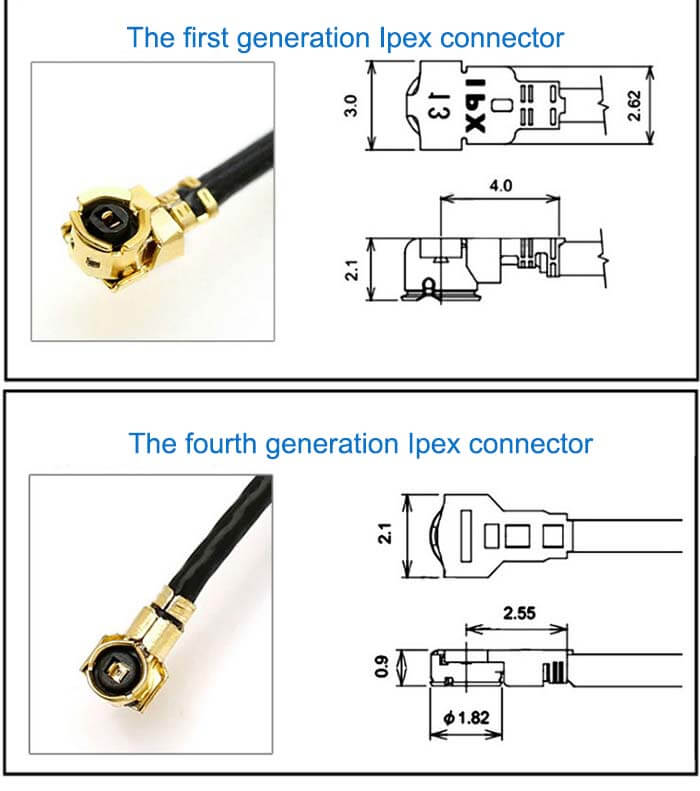
| Connector | U.FL/IPEX/MHF |
| Lightning Protection | DC Ground |
Flexible GPS PCB Antenna Passive GNSS Antenna Mechanical Specifications |
|
| Dimension | 38x16mm |
| Weight | Approx. 2g |
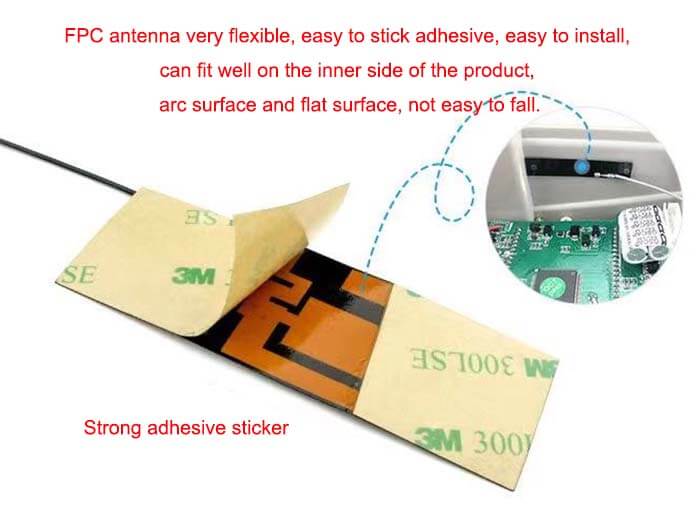
| Material | FPC |
| Operation Temperature | -40˚C ~ +85˚C |
| Storage Temperature | -40˚C ~ +70˚C |
| Color | Black |
| Antenna Form | Passive |
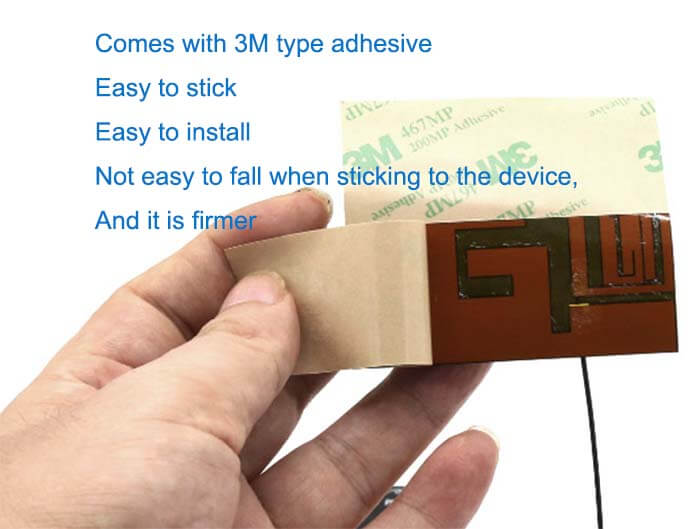
| Mounting | Sticker/Connector |
| Safety Emission and other | RoHS Compliant |
| Applications | GPS/GNSS |
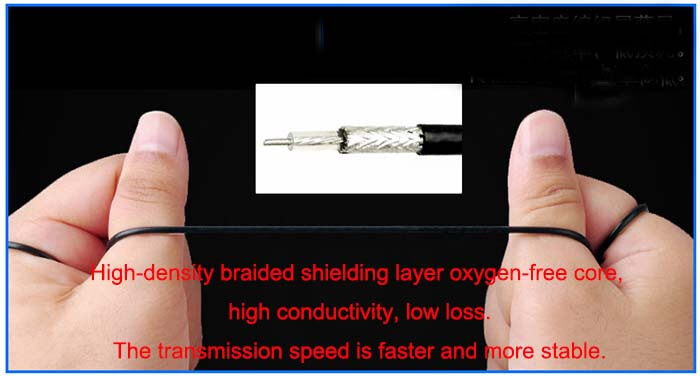
Flex PCB Antenna Features
What is the GPS positioning principle?
The basic principle of the GPS navigation system is to measure the distance between a satellite with a known location and the user’s receiver and then synthesize the data of multiple satellites to know the specific location of the receiver.
To achieve this goal, the position of the satellite can be found in the satellite ephemeris based on the time recorded by the onboard clock.
The distance from the user to the satellite is obtained by recording the time it takes for the satellite signal to propagate to the user, and then multiplying it by the speed of light (due to the interference of the atmospheric ionosphere.
This distance is not the real distance between the user and the satellite, but the pseudo-range (PR). When the GPS satellite is working normally, it will continuously use a pseudo-random code composed of 1 and 0 binary code elements (referred to as pseudo-code) to Launch navigation messages.
There are two kinds of pseudo-codes used by the GPS system, namely the civilian C/A code and the military P(Y) code.
The C/A code frequency is 1.023MHz, the repetition period is one millisecond, the code interval is 1 microsecond, which is equivalent to 300m;
The P-code frequency is 10.23MHz, the repetition period is 266.4 days, and the code interval is 0.1 microsecond, which is equivalent to 30m. The Y code is formed on the basis of the P-code, and the security performance is better.
Navigation messages include satellite ephemeris, working conditions, clock corrections, ionospheric delay corrections, atmospheric refraction corrections, and other information. It is demodulated from the satellite signal and transmitted on the carrier frequency with 50b/s modulation.
Each mainframe of the navigation message contains 5 sub-frames and each frame is 6s long. 10 characters for each of the first three frames; repeat every 30 seconds and update every hour.
The last two frames total 15000b. The contents of the navigation message mainly include telemetry codes, conversion codes, and the first, second, and third data blocks, among which the most important is ephemeris data.
When the user receives the navigation message, he extracts the satellite time and compares it with his own clock to know the distance between the satellite and the user, and then uses the satellite ephemeris data in the navigation message to calculate the position of the satellite when the message was transmitted.
The user can know the position and speed in the WGS-84 geodetic coordinate system.
It can be seen that the role of the satellite part of the GPS navigation system is to continuously transmit navigation messages.
However, since the clock used by the user receiver cannot always be synchronized with the satellite onboard clock, in addition to the user’s three-dimensional coordinates x, y, z, a Δt, the time difference between the satellite and the receiver, must be introduced as an unknown number.
Then use 4 equations to solve these 4 unknowns. So if you want to know where the receiver is, you must be able to receive signals from at least 4 satellites.
GPS receivers can receive time information accurate to nanoseconds that can be used for timing; forecast ephemeris used to predict the approximate position of satellites in the next few months; broadcast ephemeris used to calculate satellite coordinates required for positioning,
The accuracy is from a few meters to tens of meters (each satellite is different and changes at any time); and GPS system information, such as satellite status, etc.
The GPS receiver’s code measurement can get the distance from the satellite to the receiver. Because it contains the error of the receiver satellite clock and the atmospheric propagation error, it is called pseudo-range.
The pseudo-range measured for the CA code is called the CA code pseudo-range, with an accuracy of about 20 meters, and the pseudo-range measured for the P-code is called the P-code pseudo-range, with an accuracy of about 2 meters.
The GPS receiver decodes the received satellite signal or uses other technologies to remove the information modulated on the carrier, and then the carrier can be restored.
Strictly speaking, the carrier phase should be called the carrier beat frequency phase, which is the difference between the received satellite signal carrier phase affected by the Doppler shift and the signal phase generated by the receiver’s local oscillation.
Generally, it is measured at the epoch time determined by the receiver clock to keep track of the satellite signal, and then the phase change value can be recorded. However, the initial phase value of the receiver and the satellite oscillator at the beginning of the observation is unknown.
The phase integer of the beginning epoch is also unknown, that is, the ambiguity of the whole week can only be solved as a parameter in the data processing.
The accuracy of the phase observation value is as high as millimeters, but the premise is to solve the ambiguity of the whole circle.
Therefore, the phase observation value can only be used when the relative positioning and a continuous observation value are available, and the positioning accuracy is better than the meter level if only phase observations can be used.
According to the positioning method, GPS positioning is divided into single-point positioning and relative positioning (differential positioning). Single-point positioning is a way to determine the position of the receiver based on the observation data of a receiver.
It can only use pseudo-range observation and can be used for rough navigation and positioning of vehicles and ships.
Relative positioning (differential positioning) is a method of determining the relative position between observation points based on the observation data of two or more receivers.
It can use pseudo-range observations or phase observations. Both geodetic and engineering surveys should be used. Use phase observations for relative positioning.
GPS observations and measurements include satellite and receiver clock errors, atmospheric propagation delays, multipath effects, and other errors. They are also affected by satellite broadcast ephemeris errors during positioning calculations.
Most common errors are affected by relative positioning. Cancellation or weakening, so the positioning accuracy will be greatly improved.
The dual-frequency receiver can offset the main part of the ionospheric error in the atmosphere according to the observations of the two frequencies. When the accuracy is high and the distance between the receivers is relatively long (the atmosphere is obviously different ), a dual-frequency receiver should be used.
The basic principle of GPS positioning is to determine the location of the point to be measured based on the instantaneous position of the high-speed moving satellite as the known starting data, and the method of rendezvous in space distance.




Reviews
There are no reviews yet.